Китайские студенты собрали 6-осевой 3D-принтер на базе робота KUKA

Студенты из Колледжа архитектуры и градопланирования при Университете Тунцзи в Шанхае, Китай, представили 6-осевой робототехнический 3D-принтер на недавно прошедшей 3-недельной научно-практической конференции Shanghai Summer Workshop «Цифровое будущее».
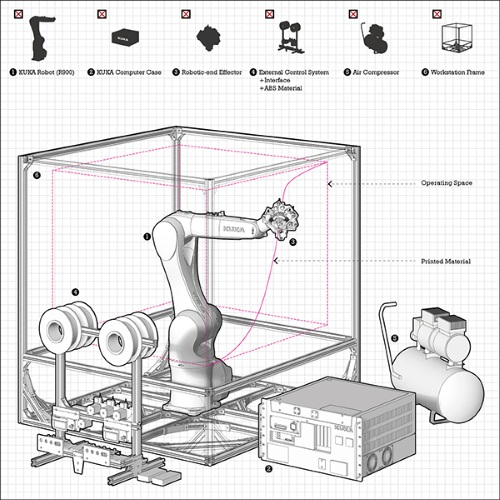
Команду студентов возглавили преподаватель Ю Лей из Университета Тунцзи, руководитель конференции Филип Ф. Юань и Панагиотис Михалатос, учитель информатики из Гарвардской школы дизайна. Под их руководством Ши Йи, Лиу Сюнь, Луо Руихуа и Куи Юки разработали и собрали 6-осевой 3D-принтер на базе робота KUKA, который может стереть границу между проектированием и производством. Он предназначен специально для архитекторов, чтобы помочь им быстро и качественно выполнять свою работу.
«Технологии цифрового производства, например, применение промышленных роботов, заменяют собой труд человека, – говорит Ши. – Тем не менее, возможности проектирования еще до конца не изучены, и чем больше мы увлекаемся цифровым производством, тем глубже становится пропасть между проектированием и производством. В рамках своего проекта мы стремились найти способ интеграции цифрового проектирования в сферу проектирования и производства. Это своего рода возрождение ручной работы в нашу цифровую эпоху. На заводах используют только те технологии, которые помогают в изготовлении продукции. Однако дизайнерам нужно взять на вооружение технологию, которая поможет им выйти за установленные рамки».

«Сегодня в большинстве случаев робототехнику используют, чтобы отказаться от человеческого труда и повысить эффективность производства. Тем не менее, нам удалось разработать стратегию производства, имитирующую законы природы. Изучая материальное и структурное воплощение трехмерных форм в природе, мы нашли способ внедрить стратегию биомиметрического производства в процесс 3D-печати. А реализовать проект нам помогло создание специального роботизированного рабочего инструмента и применение точного и легко адаптирующегося робота KUKA».

Проект был разделен на три этапа. Первый этап получил название «Биомиметрическая идея и симуляция», и здесь исследователям помогла самая обычная паутина. «Тщательно изучив паутину, мы поняли, что это идеальное воплощение структуры и процесса конструирования. Нить паутины представляет собой линию с тремя прилегающими синусоидальными волнами, усиливающим ее структуру», – объясняет Ши.

«У технологии 3D-печати имеется недюжинный потенциал, который найдет свое применение в сфере производства. Однако у нее нет ничего общего с тонким искусством и ручной работой. Она не дает полной свободы при создании трехмерных объектов и не способна воплотить структурную стратегию производства. Причина в том, что современная 3D-печать – это послойное наложение термопластика ABS/PLA в направлении силы тяжести».
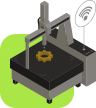
Второй этап называется «Разработка печатающей головки (роботизированного рабочего инструмента)». Пусть этот 6-осевой робототехнический 3D-принтер печатает ABS, зато он использует абсолютно новый метод производства. Исследователи решили отказаться от послойной экструзии пластика и придумали уникальный роботизированный рабочий инструмент. Ключевым компонентом в нем стал «лепестковидный поворотный круг», состоящий из одной неподвижной центральной и трех движущихся печатающих головок.

Благодаря его вращению три печатающие головки волнообразно движутся, формируя нить по принципу паутины.
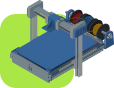
Третий этап разработчики назвали «Проектирование внешней цифровой системы управления». У каждой печатающей головки внутри есть нагреватель, который можно запрограммировать и который помогает удерживать температуру в установленных рамках. Также у принтера есть система подачи ABS к четырем печатающим головкам на базе Arduino. Принцип действия управляемых четырьмя сервоприводами головок ничем не отличается от головок, установленных в обычном 3D-принтере. Еще один сервопривод вращает поворотный круг. Также в системе есть трубы, по которым сжатый воздух поступает к печатающим головкам, охлаждая материал и помогая ему затвердеть. Скоростью подачи материала и вращения поворотного круга можно управлять с помощью соответствующих переключателей.

«Наша 6-осевая робототехническая система 3D-печати – это торжество автономного производства над цифровой тектоникой, – говорит Ши. – Нас интересовали не только результаты производства, но и сам процесс. Сочетание методов 3D-печати и робототехники – это творческий процесс. Мы хотели придумать инструмент, который позволит дизайнерам быстро и легко воплощать свои идеи, поможет им почувствовать себя искусными мастерами».