Chinese students develop 6-axis KUKA+ABS 3D printing robot inspired by spiderwebs

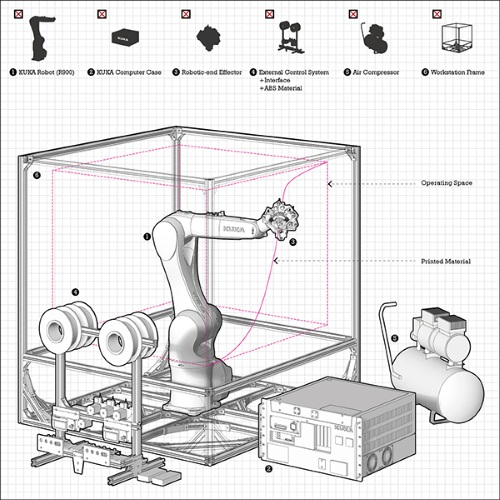
Students at the College of Architecture and Urban Planning at Tongji University in Shanghai, China have unveiled a 6-axis robotic 3D printer created during a recent 3-week "Digital Future" Shanghai Summer Workshop.
The team consists of SHI Ji in collaboration with LIU Xun, LUO Ruihua and CUI Yuqi. Under the direction of project instructor Yu Lei from Tsinghua University, Philip. F. YUAN, Workshop Leader at Tongji University and Panagiotis Michalatos, Software Tutorial, from GSD, the team has developed the 6-axis robotic 3D printer aiming to eliminate the line between "Designing" and "Fabricating", allowing architects to fabricate their work quickly and precisely.
"Digital fabrication technologies, like the application of industrial robot, has shown excellent performance in replacing human labor," noted Shi. "However, the potential in designing has not been fully excavated and seemingly the more we involved in digital fabrication the deeper the gap between designing and producing exists. In this project what I am aiming to figure out is the way of integrating digital fabrication into designing as well as producing. It is more like the revival of craftsmanship in digital age. Factories only require technology showing capabilities in making things; but designers must arm themselves with technology that perform smart strategies outside the scope of replacing human labor."

The team noted that the concept of "Digital Craftsmanship" is inspired by nature. "Most of today's researches and applications of robotic fabrication are limited to replicating human labor and raising efficiency of manufacturing. However, in the project of Robotic 6-Axis 3D Printing, we developed a fabrication strategy learning and emulating the law of nature (referring to Chinese philosophy "师法自然 "). By studying the material and structure performance of 3D form in nature, we figured out a way to incorporate biomimetic fabrication strategy into 3D printing process. And by designing the special robotic-end effector (Tooling) and utilizing the great flexibility and accuracy of KUKA robot system, the biomimetic fabricating process has been fully realized."

Shi explained the project as a three-phase concept. The first phase was the "Biomimetic Concept & Simulation," inspired by the spiderweb. "After detailed study of the spiderweb, we found it showing perfect performance in both structure and construction progress. The spider thread is abstract as a linear material in the center with 3 separate and sinusoidal wave shape material attached beside. This change can reinforce the structure," they noted.

"3D printing technology has great potential in future fabrication field, however, it is unconvincing to address it with the name of future craftsmanship. This manufacturing process has limitations in spatial flexibility and fails to perform a fabrication structural strategy. It is because the current 3D printing technology mostly relies on the superimposition of thermoplastic ABS/PLA material along direction of gravity."

Phrase two is "Design of the Printing Head (Robotic End-Effector)." Their Robotic 6-Axis 3D Printing project still uses ABS but uses a different fabrication method. Instead of layer-by-layer extrusion, they created a delicate robotic-end effector. The core component is a 'petaloid turn-plate', which features 3 movable printing head and one central fixed printing head. The whole system is powered by one servo and the rotation of turn-plate leads to the oscillating motion of 3 movable printheads, creating the spindle-knot form as desired.
Phase three is "Design of External Digital Control System." Each printing head has a heater inside which is uniquely programmed and can precisely maintain the temperature in appropriate range. There are four ABS deliver system included in their Arduino-based system. Driven by four servos, they work "like normal 3D printing devices", while one motor rotates the central turn-plate, noted the team. There are also tubes sending compressed air to the printheads to cool and finalize the material. The speed of delivering and rotating can be controlled by switches on the center stack of the control system.

"Robotic 6 Axis 3D printing is a attempt of autonomous fabrication under digital tectonics." noted Shi. "I not only focused on the fabrication results but also its process. In some degree, Combing 3D printing techniques with robot is creative and the work we did produced a tooling for future designers which can help them implement their idea quickly and easily, just like a craftsman."